想像より高精度だったAprilTagの距離計測

こんにちは、IXEの古賀です。
今回、AprilTagの距離計測の精度について細かく確認ました。
簡単な内容であり、精度の細かなデータまで提供できず申し訳有りませんが、簡易計測結果を共有します。
前提
使用カメラ:Logicool BRIO C1000eR
カメラ解像度:1280 * 720
タグ種類:tag16h5
タグサイズ:32mm
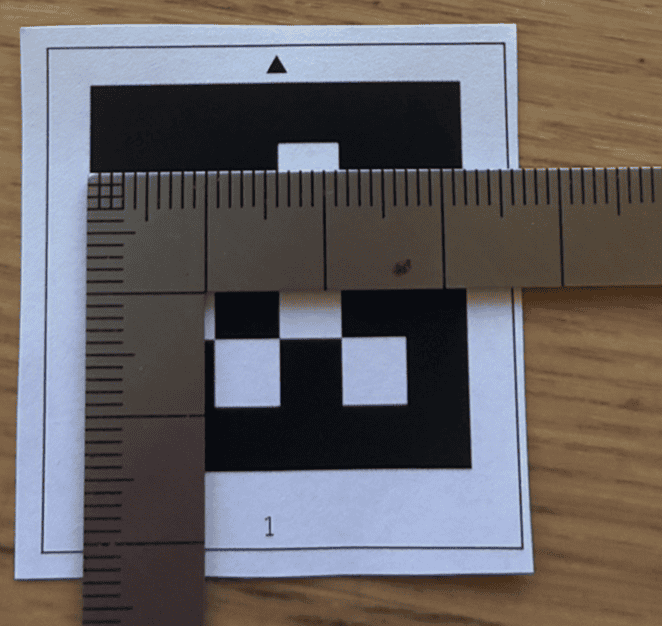
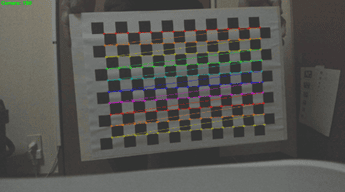
キャリブレーションは下図の通り実施済み
測定環境は下図のとおりです。

静止状態での誤差
各タグ間の中点の距離を計測しています。ID2とID11間を300mmの位置に配置。ID2とID12間を300mmの位置に配置した場合のイメージです。
いずれも実寸は合っています。
ID2とID12間はカメラに近いこともあり、誤差・バラツキが+-1mm程度です。
ID2とID11間はカメラに通り事も有り、誤差・バラツキが+-3mm程度触れます。
動作状態での誤差
タグが動く状態での計測です。
安定してリアルタイム読み込み・計測ができています。
計測できない状態
ただし、下記のような条件では精度が出ないので、留意が必要です。
①遠すぎ → タグが小さく写って精度が落ちる
②斜めから撮りすぎ → 台形変形で誤差が増える
③マーカーがテカる/しわしわ → コーナー検出がブレる
→精度を求める場合は、固い材質のものに貼り付け・印刷を行う。
まとめ
いかがだったでしょうか。特別なセンサーや特殊な専用カメラを使わずとも、この精度で活用出来る用途であれば選択肢の一つになるのではないでしょうか。もちろん、タグサイズやカメラ調整、誤差制御を行うことで更なる改善は可能と考えています。
また、今回の紹介はタグ間の距離計測のみでしたが、タグの位置を3次元的に算出し、映像上へのポリゴンの表示はもちろん、計測なども可能です。
一度ご相談頂ければ幸いです。
以上、距離計測に関する記事でした。参考にいただければ幸いです。
ARマーカーの一種である AprilTag に関する関連記事も下記にリンクしています。ぜひ参考にしてみてください。
NxWitness 新プラグイン紹介 AprilTag検出とIoT連携で現場をスマート化
AprilTagはミシガン大学によって開発され、BSDライセンスの下で提供されており、著作権表示およびライセンス条項の遵守が必要です。
弊社の技術記事は、良識のある範囲で断りなくリンクや引用を行っていただいて構いません。
